打造电梯行业新媒体!
| [打印] |
制动器是电梯的重要的安全部件,又是电梯的配套部件。制动器电路对制动器的稳定、安全、可靠工作及降低制动器温升、体积至关重要的,本文对传统制动器电路及新型制动器电路进行了试析。
一、 传统电梯制动器电路:
1、 电路结构

图3调火降压灭弧式
以上几种典型电路其结构和原理是基本相同的,均采用时间开关K完成激磁过程,激磁时间通常设为1秒.激磁(启动)时,K闭合,电源的全功率都施加在制动器线圈上;保持时,K断开,电源输出的功率加在R和制动器线圈上,降压电阻R是一个纯耗能元件。
2、电气设计指标
电路设计必须满足国标要求
1) 80%额定电压下能够可靠启动;
2) 55%额定电压以下时才可释放。
3、优点
电路简单、成本低和制作方便。
4、缺点
1)功率大、温升高。在维持状态,R上消耗的功率和制动器相等。浪费能源,激磁、保持功率无法做大,通常小于2。
2)体积大,浪费材料。仅以漆包线为例:
►对200VDC制动器:启动单边电流2A、保持单边电流1A,选Ф0.62、0.3mm 线,按照3.5A/mm 计算,其截流量为1A。
故线长=100/0.058=1700m(约4.7kg)
►对110VDC制动器:启动单边电流1.7A、保持单边电压0.85A,选Ф0.62、0.3mm 线,按照3.5A/mm 计算,其截流量为1A。
故线长=60/0.058=1000m(约2.8kg)
若增加线径,体积迅速增大,这也是比较难实现大推力的重要原因之一。
3)激磁继电器拉弧。当继电器在断开激磁电流时,线圈上的续流电流要流过继电器触点,该触点断开的瞬间,流过的电流值和激磁电流相等,因此极易烧坏触点或使触点粘连,这是最大的故障点之一。
4)实现大推力比较困难.受温升、体积、拉弧、降压措施的多方面制约。
二、自动调压、稳压控制电路原理分析
1、自动调压原理
对于惰性控制目标,如温度控制等,可改变可控硅的导通时间达到调压目的。见图

对于非惰性控制目标,可用调频调压,但是电路相对复杂,成本高。
改变可控硅的导通角调压,通常用在电机调速上,即由取样电路取样,放大整形,产生移相信号,该信号再加至可控硅控制极上实现,电路方框如下:

2、稳压原理
对于稳压控制,可按上述原理实现,其次是如何实现激励电压和保持电压的自动转换。即采用可控硅无触点开关来代替激磁继电器触点,彻底杜绝拉弧现象,提高抱闸电路的运行可靠性。
三、过激磁整流器简介
基于上述原理,为了解决传统电梯制动器电路的缺点,国内出现了由石家庄五龙制动器有限公司设计的一种具有完全自主知
识产权的“过激磁整流器”,通过5年来在世界各地的使用,证明其有独特的优势:高效能、低温升、小体积、大推力。这一高一低一大一小充分说明了电梯制动器电路的优点。随着永磁同步无齿轮曳引机的发展。对制动器提出了更高的要求。由于无齿轮无减速增力机构,制动器是直接作用于与曳引机同轴的制动轮上,所以它所需要的制动力矩在同载荷、同曳引比和同制动轮径的条件下,比有齿轮曳引机要大十几倍至几十倍。其次,由于无齿轮曳引机的出现,可以实现无机房系统,这又对制动器的体积和噪声提出了较严苛的要求。
对电磁铁而言,电磁推力取决于电磁回路中的磁势IW( I为通过线圈的电流,W为线圈的匝数),直流螺管式电磁铁的吸力计算公式为:

式中:F 电磁铁推力 (N)
S 电磁铁极面面积 (cm )
IW 励磁线圈的总磁势 (A)
δ 气隙长度 (cm)
g (单位长度漏磁导)气隙磁导 (H)
μ 空气的导磁率 (H/cm)0.4πX10-8
z 铁心伸入线圈的长度 (cm)
lc 励磁线圈的总长度 (cm)
g=Gδ/δ

上式中的后半部分和电磁铁的机械结构有关。
当其它参数不变时,要增大吸力,只有增大IW的值。I 大则温升高,且相对要增加线径,体积会增大。W大则体积增大。因此电磁铁的吸力和温升及体积是矛盾的。为了解决这个矛盾,采取了以下几个方法:
1、使用可控硅作无触点开关进行励磁和保持的转换,消除转换时的拉弧现象,通过对直流制动器的分析,拉弧现象只要出现在转换的瞬间(见下图),采用了无触点开关,则保护了抱闸回路继电器的触点,增加了可靠性。
由于磁力器线圈是一个大电感,所以当抱闸继电器闭合瞬间,流过电感的电流不能突变。故励磁电流在缓慢上升的,在接触器上不会出现严重拉弧现象。但当励磁过程结束前,励磁电流已经达到最大值,抱闸继电器触点断开的瞬间,由于电感电流不能突变,续流电流将沿如下路径流过继电器触点.此时会产生严重拉弧现象。见图7:

图7
2、通过改变可控硅的导通角,完成大电流启动和小电流保持。由于电磁铁两铁心开始吸合时,气隙很大,故磁阻也很大,通过大电流产生较大吸力使之吸合。当两铁心吸合后,气隙变小,磁阻变小。上述公式中的(S/δ )项变的很大。这时,可以用很小的电流就能可靠保持,并有足够大的保持力。可控硅在启动和保持时的导通角如下图所示:

图8
3、启动时间内,采用电压补偿的方法使得输入电压变化+/-40% 时,输出电压变化20%,在较宽的电压范围内减小了启动电流的波动。
4、保持时间内,采用移相控制方法使保持电压达到稳定,做到了稳压输出。电路控制过程为:

图9
即: 在保持状态下达到了恒功率,进一步大大降低了温升。磁力器工作中启动仅占很小的时间(通常为0.6~0.7S),所以,降低温升的关键是降低保持时的功率,保持状态占工作总时间的99%以上。
5、为防止人为的短路事故及线圈多年工作出现的匝间短路及绝缘降低短路等事故电路中增加了短路保护。无论在启动状态还是保持状态,不论是先短路后加电还是先加电后短路, 控制器均不会烧坏,并且显示故障信号,。
6、励磁时间可调。测出磁力器的启动时间SQ, 调整励磁时间为SQ的2~3 倍。这样,就可靠地保证了磁力器的完全充分吸合,而不是像传统制动器定为固定时间1S,启动时间的优化,进一步有
效地降低了温升。
7、保持电压和启动电流可调。可根据实际工况优化调整,尤其是保持电流。由于是温压输出,所以输入电压在 50V~150V之间变化时,(对于AC110V而言)输出电压变化小于10%,可进一步减小保持电流值。无须考虑国标中55%电源电压时释放的条件要求。以CSC3000的磁力器为例,单线圈电流值可选
在0.55~0.55A左右,磁力器总功率为20W。
8、设计上有足够大的安全系数。二极管选用9A,可控硅选用65A,而磁力器最大电流小于4A,大推力磁力器的最大电流小于7A。
9、设有去剩磁开关控制。可根据工况需要调整释放时间或长或短。
过激磁整流器电路框图如下:
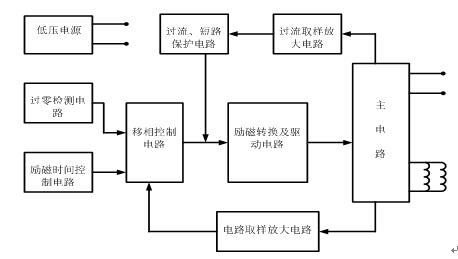
图10
四、过激磁整流器工作性能及极限参数
1) 输入电源电压: 满足启动 80~150V
(110VAC) 满足保持 50~150V
2) 短路保护电压: 大于100V
(线圈两端) 折合电流 大于5~6A
3) 电磁铁推力 大于标称值
五、制动器的选型
制动器是电梯的重要的安全部件,又是电梯的配套部件,如何准确地使用制动器,充分发挥其性能,在使用中提高安全性,最关键的问题之一就是如何选型。但是,在历来的传统制动器选型中给人们留下了一个错觉,即:制动器无选型问题可言,只要拿过来就能用。这一点我们通过上面的一、二、三问题之后,大家可能有所认识了。究其原因有以下几点:
1)传统制动器的抱闸电路基本相同,除了电阻降压、全波降压之分无任何变化。且电源的总功率都是在保持态降为原来的一半。
2)制动器线圈的直流电阻在长期的使用中大家都已约定俗成。即线圈电阻仅根据不同的两种电源而有所不同,且差别不是很大,即使把110V的线圈用到220V上也不会出现太大的问题。如:
200/30=6.6A , 200/60=3.3A,
200/50=4.0A , 200/100=2.0A
因为在线圈的设计中总会留一些裕量。
3)传统制动器按推力大小分类很少,仅有中小推力的几个型号,选型时不易搞错。而采用带过激磁整流器的制动器则不同,在选型时必须全面考虑,如果选错将会造成很大的故障隐患。我们看下面两个例子:
a/ 将带过激磁整流器的磁力器直接用于传统制动器的控制 回路上。可能认为都是两组线圈,接上去还不是一样?
我们来计算一下,以CSC3000为例:
110V传统制动器线圈电阻 30欧姆
带过激磁整流器的电阻值 18欧姆
传统制动器启动3.7A 保持1.85A
错误制动器启动5.5A 保持2.1A
220V传统制动器线圈电阻 50欧姆
带过激磁整流器的电阻值 18欧姆
传统制动器启动4.0A 保持2.0A
错误制动器启动11.1A 保持3.0A
这势必造成很快地触点粘连,烧坏接触器。
b/ 制动器跨型号使用。认为大推力可以兼容小推力,或认为推力越大余量越大,只有好处而无害处。这势必造成噪声显著增大。根据制动器的设计指标,哪种推力的制动器配那种合适的弹簧是经过计算的。制动器启动时的弹簧起始力应有机配合,正常情况下,推力已足大于弹簧的张力,如果在弹簧不变的前提下进一步增大弹簧的推力,则造成制动器起始力远大于弹簧张力,根据动量定律:动量=M.V,冲量=M.ΔV 推力越大,冲量和动量越大,使制动器降噪部件承受超负荷的压力和冲力,故噪声明显增大。
所以,制动器选型是非常重要的。
c/ 将110VAC的过激磁整流器用于220VAC电源上,使烧坏,过激磁整流器或一直处于保护状态而不能工作。不同电源的过激磁整流器在可控桥中控制可控硅的导通角是不一样的,电源高的导通角小,电源低的导通角大,在无专业人员进行调试的情况下,随意更换,将带来严重后果。其一烧坏低电源变压器(110V改为220V),使低压电路无法工作;其二,由于110V导通角大于110度,220V导通角小于80度。如果将110V用于220V,将输出电压大大增加,可瞬间烧坏过激磁整流器。
凡此种种,都是在选型时必须重视的关键问题。下面谈一下选型时要考虑的几个问题。
1/确认输入电源。是直流电源还是交流电源,若是直流电源则无需控制器,反之必须配备合适的过激磁整流器。
2/确认电源电压额定值。是110V还是220V,对直流电源的制动器而言,不同额定电压时串接的降压电阻不同。
3/对于交流电源,需按额定电压定购配套的过激磁整流器,两种电压的过激磁整流器绝对不可互换,不能以貌取之。
4/确认用户提供的电源的额定输出功率。必须保证大于磁力器的启动功率。如3000,4000启动功率均为250W,用户电源供给磁力器的功率应为300W 左右,不包括电源变压器向其它负荷提供的功率。
5/根据不同曳引机的型号,确定相应的制动力矩,并按此制动力矩选择与之最接近且大于此制动力矩的制动器,不可跨型号选择,更不可在选型时以大推力兼容小推力。
6/各种不同型号的磁力器有与之相对应的过激磁整流器,不可将不同型号的过激磁整流器用于同一种磁力器上,如:3000磁力器线圈电阻18欧姆,4000磁力器线圈电阻为14欧姆。如果过激磁整流器用错型号,则影响磁力器的正常工作状态。诸如启动、维持电流超差,短路保护值不适当等。
7/对于通电持续率和工作频率有特殊要求的用户,应提前向制造厂家申明,待厂家确认能够满足要求并反馈信息后方可进行定货。
根据以上内容,作成制动器选型流程图如下:
